

Spécialisé dans la vente de produits robotiques ! Robots éducatifs, robots jouets, objets connectés
- Accueil >
- Robots Educatifs >
- ROBOTIS >
- Modules Et Pièces ROBOTIS > OpenManipulator-X Robotis RM-X52-TNM


OpenManipulator-X Robotis RM-X52-TNM

OpenMANIPULATOR-X (RM-X52-TNM) de Robotis, compatible ROS, est une plate-forme robotisée entièrement ouverte comprenant OpenSoftware, OpenHardware et OpenCR (carte embarquée).
OS-enabled OpenMANIPULATOR-X RM-X52-TNM par Robotis
OpenSoftware
OpenMANIPULATOR-X RM-X52-TNM sont basés sur ROS et OpenSource. Plate-forme matérielle officielle de ROS, la série TurtleBot prend en charge'TurtleBot Arm'. L'OpenMANIPULATOR-X RM-X52-TNM est entièrement compatible avec TurtleBot3. Les utilisateurs peuvent également le contrôler plus facilement en le reliant avec le package MoveIt ! Même si vous n'avez pas de robot, vous pouvez contrôler le robot dans le simulateur Gazebo.
OpenHardware
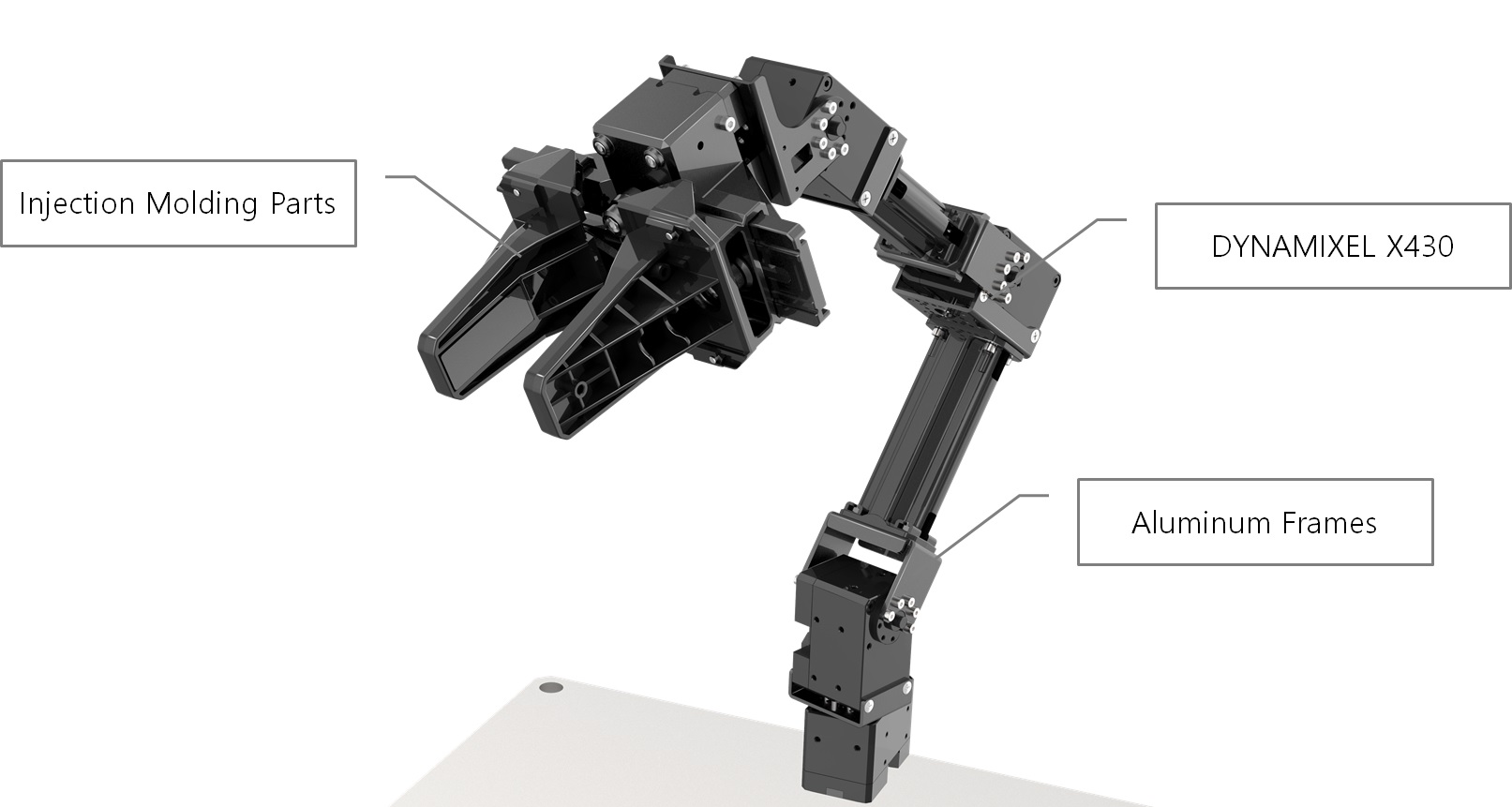
OpenMANIPULATOR-X RM-X52-TNM est une plate-forme ouverte orientée matériel. La plupart des composants sont téléchargés sous forme de fichiers STL afin que les utilisateurs puissent facilement les imprimer en 3d. Il permet également aux utilisateurs de modifier la longueur des liens ou la conception du robot pour leurs propres besoins. OpenMANIPULATOR-X RM-X52-TNM est fait de Dynamixel X Series qui est utilisé dans TurtleBot.
OpenCR (Cartes embarquées)
OpenMANIPULATOR-X RM-X52-TNM peut également être contrôlé en utilisant OpenCR (Open-source Control module for ROS), la carte de contrôle utilisée dans TurtleBot3. La puissance de calcul et la contrôlabilité en temps réel d'OpenCR peuvent prendre en charge les cinématiques avant et arrière, ainsi que les exemples de contrôle de profils.
Exemples Dynamixels
OpenMANIPULATOR-X RM-X52-TNM est composé de la série Dynamixel X et de pièces d'impression 3D. Dynamixel a une forme modulaire et adopte la méthode de la marguerite en chaîne. Il permet aux utilisateurs d'ajouter ou de retirer facilement des joints pour leur propre usage. Profitant de cette caractéristique, les utilisateurs peuvent construire sept types différents d'OpenMANIPULATOR-X series : Chaîne, SCARA, Link, Planar, Delta, Stewart et Linear.
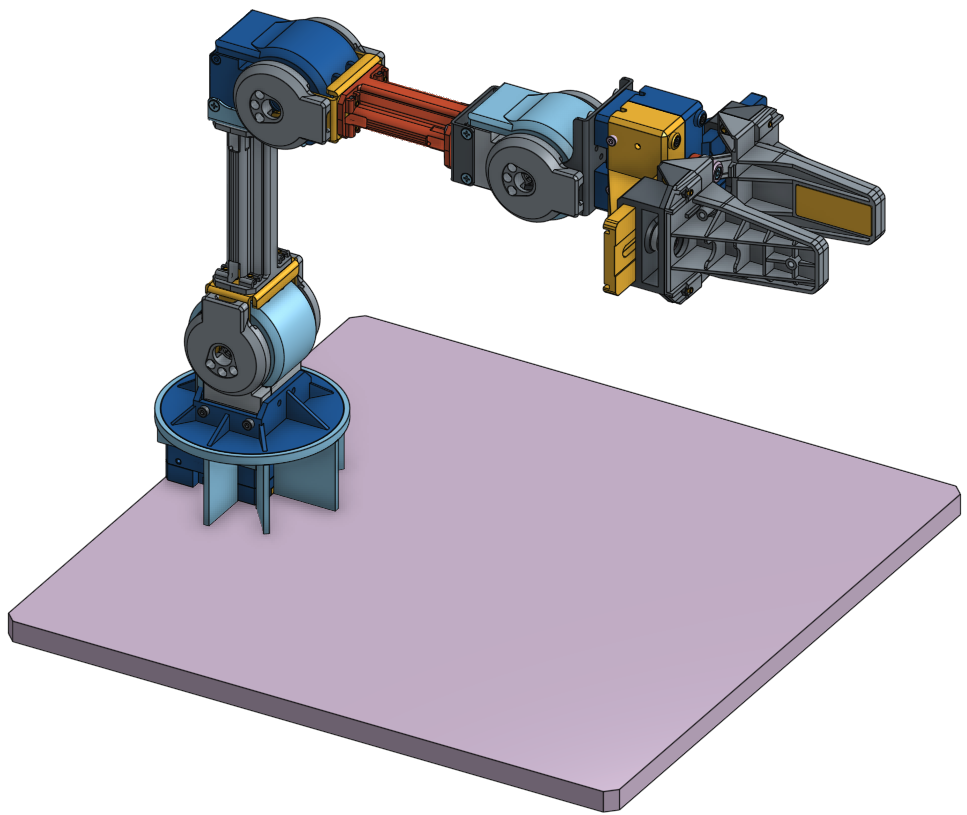
Caractéristiques du bras robotisé Robotis OpenMANIPULATOR-X
- DYNAMIXEL XM430-W350-T
- Alimentation (vendue séparément) 12V
- Liberté de degré 5 (4DOF + 1DOF Gripper)
- Charge utile 500g
- RPM (joint) 46RPM
- Poids (montage) 700g
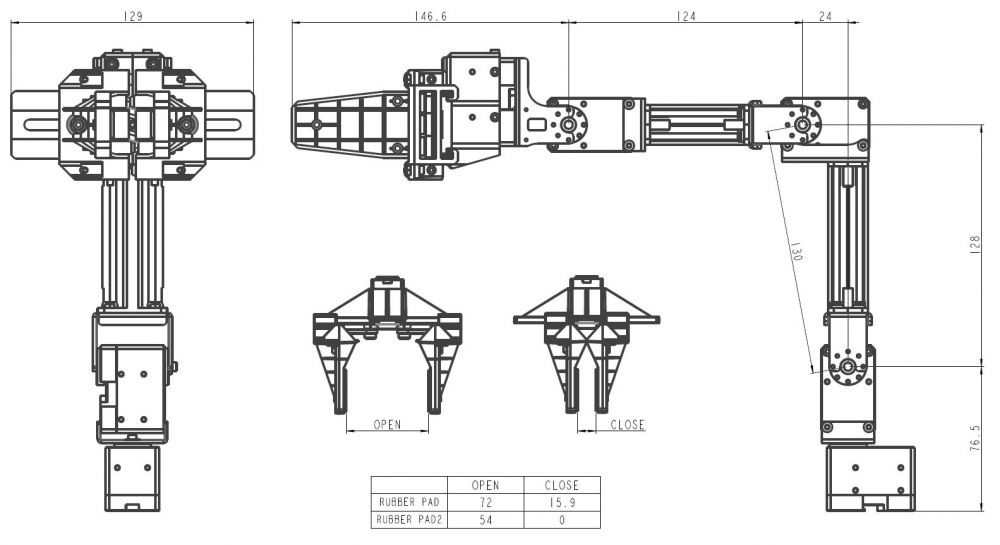
- Longueur 380mm
- Course du préhenseur 20~75mm
- Interface TTL Niveau TTL Multi Drop BUS
- ROS logiciel. DYNAMIXEL SDK, Arduino, Traitement
- Contrôleur (vendu séparément) PC, OpenCR
OpenMANIPULATOR-X RM-X52-TNM Robotis: dans la boîte
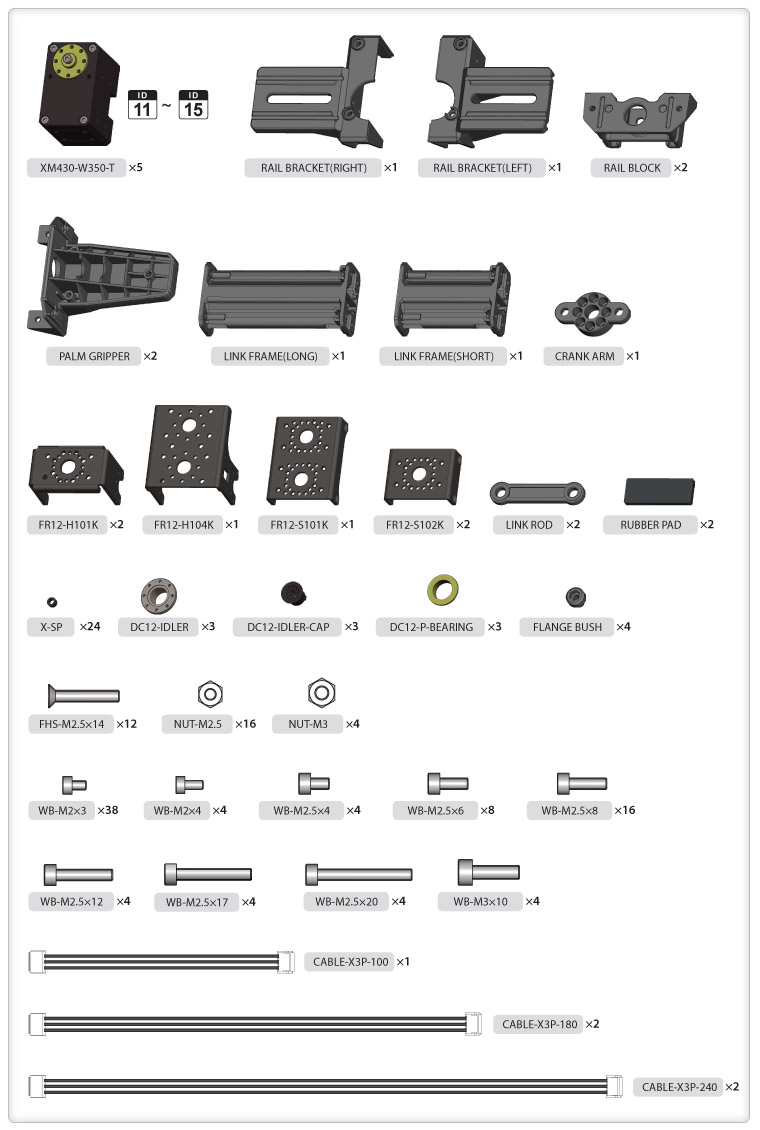
Mise en garde
DYNAMIXEL, l'alimentation et le contrôleur ne sont pas inclus et à acheter séparément.
Compatible avec le contrôleur TB3 et l'alimentation. Le manuel d'assemblage n'est pas inclus, mais vous pouvez télécharger le fichier PDF sur notre produit en feuille.







