

Spécialisé dans la vente de produits robotiques ! Robots éducatifs, robots jouets, objets connectés
- Accueil >
- Robots Educatifs >
- ROBOTIS >
- Servomoteurs Dynamixel > Servomoteur Dynamixel XM540-W270 T/R



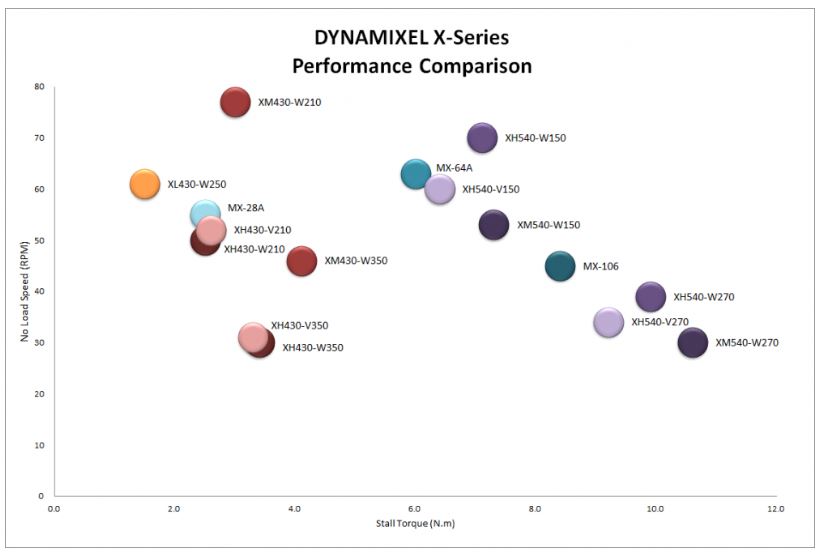
Servomoteur Dynamixel XM540-W270 T/R

Le servomoteur DYNAMIXEL XM540-W270 est un actionneur intelligent exclusif au robot avec moteur à courant continu entièrement intégré + réducteur de réduction + contrôleur + pilote + réseau dans un module servo DC.
Les séries DYNAMIXEL XH / XM de Robotis offrent une variété de techniques de contrôle basées sur des algorithmes de détection de courant haute performance. Il adopte le boîtier en aluminium et adopte la nouvelle technologie telle que la structure de fixation de câble creux pour le confort de l'utilisateur.
Choisissez sur cette fiche produit avant votre commande le dynamixel XM540-W270-T ou XM540-W270-R.
Servomoteur Dynamixel Robotis XM540-W270
DYNAMIXEL est un actionneur intelligent exclusif au robot avec moteur à courant continu entièrement intégré + réducteur de réduction + contrôleur + pilote + réseau dans un module servo DC.
Les séries DYNAMIXEL XH / XM offrent une variété de techniques de contrôle basées sur des algorithmes de détection de courant haute performance. Il adopte le boîtier en aluminium et adopte la nouvelle technologie telle que la structure de fixation de câble creux pour le confort de l'utilisateur.
Pour connaîtres toutes les spécificités de ce servomoteur dynamixel Robotis, consultez sa fiche dédiée sur le site officiel ICI.
- 6 modes de fonctionnement
- Contrôle de couple, Contrôle de vitesse, Contrôle de position, Contrôle de position étendu, Contrôle de position basé sur le courant, Contrôle de position PWM
- Contrôle de profil pour une planification fluide des mouvements
- Dissipateur thermique amélioré muni d'un boîtier en aluminium
- Étui à dos creux pour réduire au minimum la tension du câble (acheminement dans les trois sens)
- Montage direct par vis sur le boîtier (sans écrou)
- Economie d'énergie (courant réduit de 100mA à 40mA)
- Diminution de 28,4 % du volume par rapport au MX-106
- Prise en charge du mode de contrôle synchrone
- Prise en charge des ports E/S externes
Dynamixel XM540-W270: spécificités
- Nom du modèle XM540-W270-T ou XM540-W270-R
- MCU Cortex-M3 (72[Mhz], 32[bit])
- Tension d'entrée Min. V] 10.0 / Recommandé[V] 12.0 / Max. [V] 14.8
- Caractéristiques de performance Tension[V] 12.0 / Couple de décrochage[N-m] 10.60 / Courant de décrochage[A] 4.4 / Vitesse à vide[tr/min] 30.0 / Courant sans charge[A] 0.07
- Tension de fonctionnement continu[V] - / Couple[N-m] - / Vitesse[tr/min] - / Courant[A] - / Courant[A
- Résolution Résolution Résolution[deg/pulse] 0.0879 / Pas[pulse] 4,096 / Angle[degré] 360 / / Angle[degré
- Capteur de position Codeur absolu sans contact (12[bit], 360[deg]) / Fabricant : ams(www.ams.com), Numéro de pièce : AS5045
- Température de fonctionnement Min. °C] -5 / Max. [°C] 80
- Moteur Coreless
- Baud Rate Min. 9 600 / Max. bps] 4 500 000
- Algorithme de contrôle PID
- Type d'engrenage Éperon
- Matériau des engrenages Métal précieux
- Matériau du boîtier Métal précieux (recto, milieu) / Plastique technique (verso)
- Dimensions (WⅹHⅹD)[mm] 33,5 X 58,5 X 44 X 44
- Dimensions (WⅹHⅹD)[pouces] 1.32 X 2.30 X 1.73
- Poids[g] 165.00
- Poids[oz] 5.82
- Rapport de démultiplication 272,5 : 1
- Signal de commande Paquet numérique
- Type de protocole Communication série asynchrone semi-duplex asynchrone de type protocole (8 bits, 1èreop, sans parité)
- Liaison (physique) : TTL Level Multi Drop Bus (modèle T) / RS485 Multi Drop Bus (modèle R)
- ID 0 ~ 252
- Position du Larsen, Vitesse, Courant, Courant, Ticket temps réel, Trajectoire, Température, Tension, Port externe, etc.
- Version de protocole 1.0 / 2.0 (par défaut)
- Mode de fonctionnement / Régulation de courant d'angle mode:Endless turn / Velocity Control mode:Endless turn / Position Control Mode:360[deg] / Extended Position Control Mode:±256[rev] / Régulation de position basée sur le courant Mode:±256[rev] / PWM Control Mode:Endless turn
- Sortie[W] - - Sortie
- Courant de veille[mA] 40
Compatibilités
- Controller : OpenCM 485 Expansion Board, OpenCR1.0
- Interface : USB2Dynamixel, U2D2
Attention :
- Organisez le câble enchevêtré avant d'assembler le boîtier arrière.
- Ne pas assembler le boîtier arrière avec un câble emmêlé. Le câble emmêlé peut être écrasé par le boîtier et provoquer une erreur de communication.
- Si vous utilisez deux câbles à travers le boîtier creux, les câbles seront endommagés.
- N'utiliser qu'un seul câble à travers le boîtier creux.
- Le DYNAMIXEL X-Series a adopté un nouveau connecteur JST plaqué or pour une communication sûre et fiable.
- Le connecteur utilisé pour le Dynamixel précédent est Molex.
- Pour commander les actionneurs DYNAMIXEL X-Series via OpenCM ou USB2Dynamixel, veuillez utiliser le câble convertible JST-Molex fourni dans l'emballage.
- XM540-W270-T or XM540-W270-R 1
- HN13-N101 1
- Teflon Washer (for Horn Assembly) 1
- Robot Cable-X3P 180mm 1
- Robot Cable-X3P (Convertible) 180mm 1
- 3P Sync Cable 160mm 1
- Wrench Bolt WB M2.5x5 16
- Wrench Bolt WB M2.5x4 10
- Wrench Bolt WB M3x8 1
- Spacer Ring 8







