

Specialized in the sale of robotic products! educational robots, toy robots, connected objects
- Home >
- Educational Robots >
- ROBOTIS >
- Dynamixel Servos > Servomotor Dynamixel XM540-W270 T/R



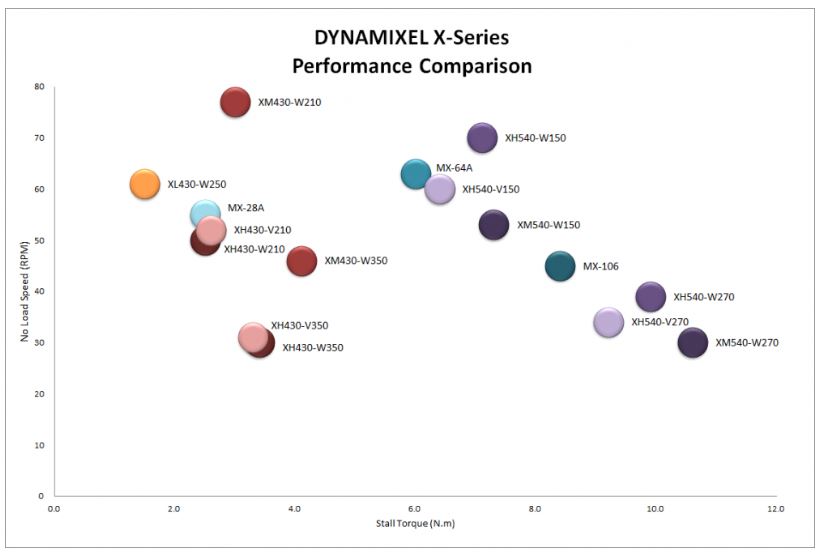
Servomotor Dynamixel XM540-W270 T/R

The DYNAMIXEL XM540-W270 servo motor is an intelligent robot-exclusive actuator with a fully integrated DC motor + reduction gearbox + controller + pilot + network in a DC servo module.
The Robotis DYNAMIXEL XH / XM series offer a variety of control techniques based on high-performance current detection algorithms. It adopts the aluminium housing and adopts new technology such as the hollow cable fixing structure for user comfort.
Choose on this product sheet before your order the dynamixel XM540-W270-T or XM540-W270-R.
Robotis Servomotor Dynamixel XM540-W270
DYNAMIXEL is an intelligent robot-exclusive actuator with a fully integrated DC motor + reduction gearbox + controller + pilot + network in a DC servo module.
The DYNAMIXEL XH / XM series offer a variety of control techniques based on high-performance current detection algorithms. It adopts the aluminium housing and adopts new technology such as the hollow cable fixing structure for user comfort.
To know all the specificities of this Robotis dynamixel servomotor, consult its dedicated sheet on the official website HERE.
- 6 operating modes
- Torque control, Speed control, Position control, Extended position control, Current based position control, PWM position control
- Profile control for smooth movement planning
- Improved heat sink with aluminum housing
- Hollow back case to minimize cable tension (three-way routing)
- Direct screw mounting on the housing (without nut)
- Energy saving (current reduced from 100mA to 40mA)
- 28.4% decrease in volume compared to MX-106
- Support for synchronous control mode
- Support for external I/O ports
Dynamixel XM540-W270: specificities
- Model Name XM540-W270-T or XM540-W270-R
- MCU Cortex-M3 (72 [Mhz], 32 [bit])
- Input Voltage Min. [V] 10.0 / Recommended [V] 12.0 / Max. [V] 14.8
- Performance Characteristics Voltage [V] 12.0 / Stall Torque [N·m] 10.60 / Stall Current [A] 4.4 / No Load Speed [rpm] 30.0 / No Load Current [A] 0.07
- Continuous Operation Voltage [V] - / Torque [N·m] - / Speed [rpm] - / Current [A] -
- Resolution Resolution [deg/pulse] 0.0879 / Step [pulse] 4,096 / Angle [degree] 360 /
- Position Sensor Contactless absolute encoder (12 [bit], 360 [deg]) / Maker : ams(www.ams.com), Part No : AS5045
- Operating Temperature Min. [°C] -5 / Max. [°C] 80
- Motor Coreless
- Baud Rate Min. [bps] 9,600 / Max. [bps] 4,500,000
- Control Algorithm PID
- Gear Type Spur
- Gear Material Precious Metal
- Case Material Precious Metal(Front, Middle) / Engineering Plastic(Back)
- Dimensions (WⅹHⅹD) [mm] 33.5 X 58.5 X 44
- Dimensions (WⅹHⅹD) [inch] 1.32 X 2.30 X 1.73
- Weight [g] 165.00
- Weight [oz] 5.82
- Gear Ratio 272.5 : 1
- Command Signal Digital Packet
- Protocol Type Half duplex Asynchronous Serial Communication (8bit, 1stop, No Parity)
- Link (Physical) : TTL Level Multi Drop Bus (Model T) / RS485 Multi Drop Bus (Model R)
- ID 0 ~ 252
- Feedback Position, Velocity, Current, Realtime tick, Trajectory, Temperature, Voltage, External Port, etc.
- Protocol version 1.0 / 2.0 (Default)
- Operating Mode / Angle Current Control mode:Endless turn / Velocity Control mode:Endless turn / Position Control Mode:360 [deg] / Extended Position Control Mode:±256 [rev] / Current-based Position Control Mode:±256 [rev] / PWM Control Mode:Endless turn
- Output [W] -
- Standby Current [mA] 40
Compatibilities
- Controller : OpenCM 485 Expansion Board, OpenCR1.0
- Interface : USB2Dynamixel, U2D2
Caution :
- DYNAMIXEL X-Series through a hollow housing
- Organize the entangled cable before assembling the rear box.
- Do not assemble the rear housing with a tangled cable. The tangled cable may be crushed by the housing and cause a communication error.
- If you use two cables through the hollow housing, the cables will be damaged.
- Use only one cable through the hollow housing.
- The DYNAMIXEL X-Series has adopted a new gold-plated JST connector for safe and reliable communication.
- The connector used for the previous Dynamixel is Molex.
- To order DYNAMIXEL X-Series actuators via OpenCM or USB2Dynamixel, please use the JST-Molex convertible cable provided in the package.
| RS485 Multi Drop Bus |
- XM540-W270-T or XM540-W270-R 1
- HN13-N101 1
- Teflon Washer (for Horn Assembly) 1
- Robot Cable-X3P 180mm 1
- Robot Cable-X3P (Convertible) 180mm 1
- 3P Sync Cable 160mm 1
- Wrench Bolt WB M2.5x5 16
- Wrench Bolt WB M2.5x4 10
- Wrench Bolt WB M3x8 1
- Spacer Ring 8







