

Spécialisé dans la vente de produits robotiques ! Robots éducatifs, robots jouets, objets connectés
- Accueil >
- Robots Educatifs >
- ROBOTIS >
- Modules Et Pièces ROBOTIS > OpenCR1.0 Robotis


OpenCR1.0 Robotis

OpenCR1.0 de Robotis (Open-source Control module for ROS) est un contrôleur de robot open source intégré avec un puissant MCU de la gamme ARM Cortex-M7.
Le matériel, le logiciel, les schémas, le PCB Gerber, la nomenclature et les codes sources du firmware de l'OpenCR1.0, les contrôleurs principaux utilisés dans la plateforme éducative officielle de ROS TurtleBot3, sont accessibles et ouverts au public.
Robotis OpenCR1.0 : Module de contrôle open-source pour ROS
OpenCR1.0 (Open-source Control module for ROS) est un contrôleur de robot open source intégré avec un puissant MCU de la gamme ARM Cortex-M7. Le matériel, le logiciel, les schémas, le PCB Gerber, la nomenclature et les codes sources du firmware de l'OpenCR1.0, les contrôleurs principaux utilisés dans la plateforme éducative officielle de ROS TurtleBot3, sont accessibles et ouverts au public.
Supporte RS-485 et TTL pour contrôler les Dynamixels, et offre UART, CAN et une variété d'autres environnements de communication, des outils de développement tels que Arduino IDE sont également disponibles. Il a l'avantage de pouvoir fonctionner plus puissamment lorsqu'il est utilisé avec un contrôleur hôte tel que SBC (Single Board Computer). Il fournit diverses sources exclusives basées sur ROS, afin que vous puissiez maximiser les fonctions d'OpenCR1.0 lorsque vous utilisez ROS.
Tous les détails du produit et de son utilisation sur le site officiel Robotis ICI. Il est compatible avec les Dynamixel X-Series, Dynamixel AX/MX Series (nécessite un câble convertible Molex-JST), Dynamixel PRO Series (câble convertible Molex-JST requis) et les Capteurs Robotis.
OpenCR1.0 de Robotis: caractéristiques techniques
- Microcontrôleur : STM32F746ZGT6 / 32-bit ARM Cortex®-M7 avec FPU (216MHz, 462DMIPS)
- Capteurs : Gyroscope 3Axis, Accéléromètre 3Axis, Magnétomètre 3Axis (MPU9250)
- Programmateur : ARM Cortex Connecteur JTAG/SWD 10 broches JTAG/SWD - Mise à niveau du micrologiciel du périphérique USB (DFU) - Série
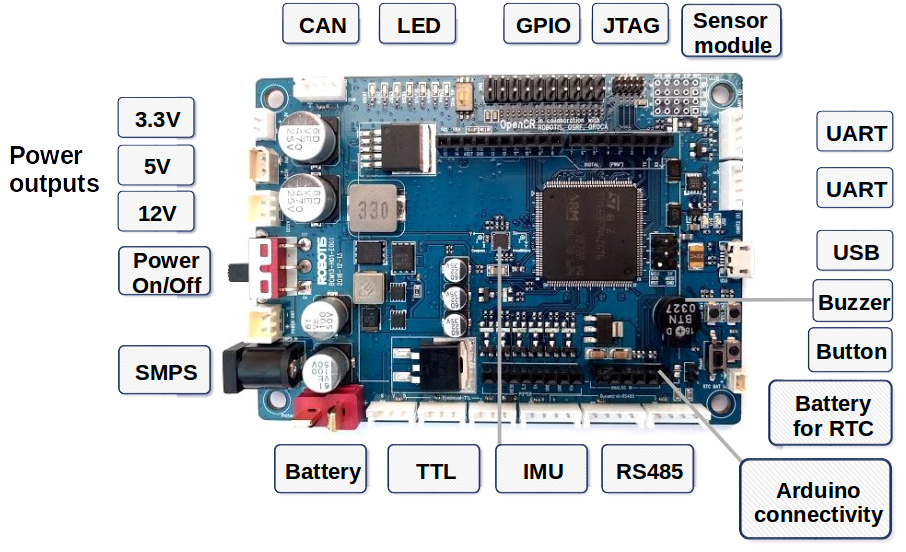
- Broches d'extension : 32 broches (L 14, R 18) *Connectivité arduino - Module capteur x 4 broches - Connecteur d'extension x 18 broches
- Circuits de communication : USB (connecteur Micro-B USB/USB 2.0/Hôte/Périphérique/OTG) - TTL (B3B-EH-A / Dynamixel) - RS485 (B4B-EH-A / Dynamixel) - UART x 2 (20010WS-04) - CANETTE (20010WS-04)
- LEDs et boutons : LD2 (rouge/vert) : Communication USB - LED utilisateur x 4 : LD3 (rouge), LD4 (vert), LD5 (bleu) - Bouton utilisateur x 2
- Dimensions 105(W) X 75(D) mm
- Poids 60g
OpenCR 1.0 Robotis, Alimentation
- Source d'entrée externe
- 5 V (USB VBUS), 7-24 V (batterie ou SMPS)
- Batterie par défaut : LI-PO 11,1V 1 800mAh 1 800mAh 19,98Wh
- Valeur par défaut SMPS : 12V 5A
- Source de sortie externe
- 12V@1A(SMW250-02), 5V@4A(5267-02A), 3.3V@800mA(20010WS-02)
- Port batterie externe pour RTC (Real Time Clock) (Molex 53047-0210)
- LED d'alimentation : LD1 (rouge, 3,3 V sous tension)
- Bouton de réinitialisation x 1 (pour réinitialisation de la carte)
- Interrupteur marche/arrêt x 1
- 1x OpenCR1.0
- 1x USB Micro B Cable







