

Specialized in the sale of robotic products! educational robots, toy robots, connected objects
- Home >
- Educational Robots >
- ROBOTIS >
- Modules And Parts ROBOTIS > OpenCR1.0 Robotis


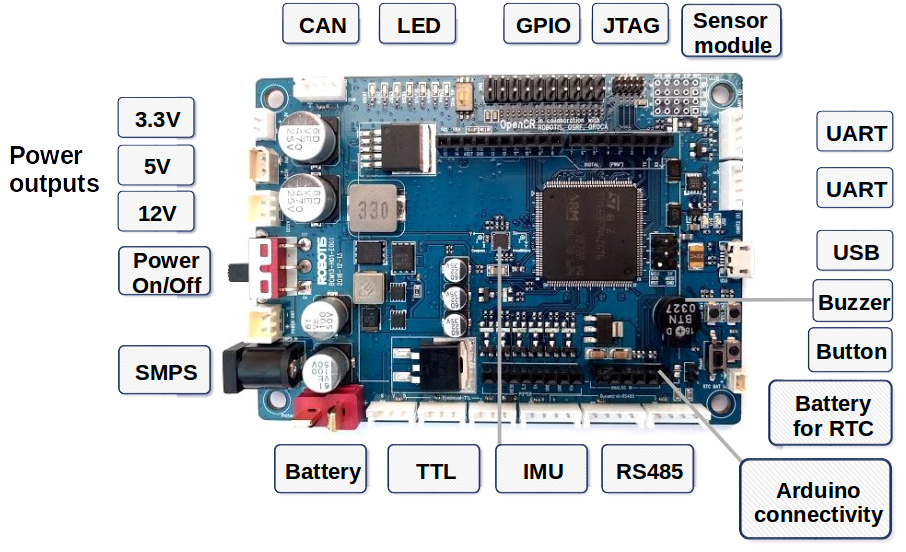
OpenCR1.0 Robotis

Robotis OpenCR1.0 (Open-source Control module for ROS) is an integrated open source robot controller with a powerful MCU from the ARM Cortex-M7 range.
The hardware, software, schematics, Gerber PCB, OpenCR1.0 firmware nomenclature and source code, the main controllers used in the official ROS TurtleBot3 educational platform, are accessible and open to the public.
Robotis OpenCR 1.0 : Open-source control module for ROS
OpenCR1.0 (Open-source Control module for ROS) is an open source robot controller embedded with a powerful MCU from the ARM Cortex-M7 line-up. The hardware, software, schematics, PCB Gerber, BOM, and firmware source codes of the OpenCR1.0, the main controller used in the official ROS education platform TurtleBot3, are accessible and open to the public.
Supports RS-485 and TTL to control the Dynamixels, and offers UART, CAN and a variety of other communication environment, development tools such as Arduino IDE are available as well. It has the advantage of being able to operate more powerfully when used with a host controller such as SBC (Single Board Computer). It provides various exclusive sources based on ROS, so that you can maximize the functions of OpenCR1.0 when using ROS.
All the details of the product and its use on the official Robotis website HERE. It is compatible with the Dynamixel X-Series, Dynamixel AX/MX Series (requires a Molex-JST convertible cable), Dynamixel PRO Series (Molex-JST convertible cable required) and Robotis Sensors.
Robotis OpenCR1.0: technical specifications
- Microcontroller: STM32F746ZGT6 / 32-bit ARM Cortex®-M7 with FPU (216MHz, 462DMIPS)
- Sensors: Gyroscope 3Axis, Accelerometer 3Axis, Magnetometer 3Axis (MPU9250)
- Programmer: ARM Cortex JTAG/SWD 10-pin JTAG/SWD connector - USB Device Firmware Upgrade (DFU) - Serial
- Extension pins: 32 pins (L 14, R 18) *Arduino connectivity - Sensor module x 4 pins - Extension connector x 18 pins
- Communication circuits: USB (Micro-B USB/USB 2.0/Host/Host/Device/OTG connector) - TTL (B3B-EH-A / Dynamixel) - RS485 (B4B-EH-A / Dynamixel) - UART x 2 (20010WS-04) - CANETTE (20010WS-04)
- LEDs and buttons : LD2 (red/green): USB communication - User LED x 4: LD3 (red), LD4 (green), LD5 (blue) - User button x 2
- Dimensions 105(W) X 75(D) mm
- Weight 60g
OpenCR 1.0 Robotis, Power
- External input source
- 5 V (USB VBUS), 7-24 V (battery or SMPS)
- Default battery: LI-PO 11.1V 1,800mAh 1,800mAh 19.98Wh
- SMPS default value: 12V 5A
- External output source
- 12V@1A(SMW250-02), 5V@4A(5267-02A), 3.3V@800mA(20010WS-02)
- External battery port for Real Time Clock (RTC) (Molex 53047-0210)
- Power LED: LD1 (red, 3.3 V on)
- Reset button x 1 (to reset the card)
- On/off switch x 1
- 1x OpenCR1.0
- 1x USB Micro B Cable







